项目名称:融合视觉信息的分拣机器人姿态分析与自适应抓取方法研究
所属院校:陕西工业职业技术学院
成果完成人:机械工程学院穆龙涛副教授 博士
项目简介:
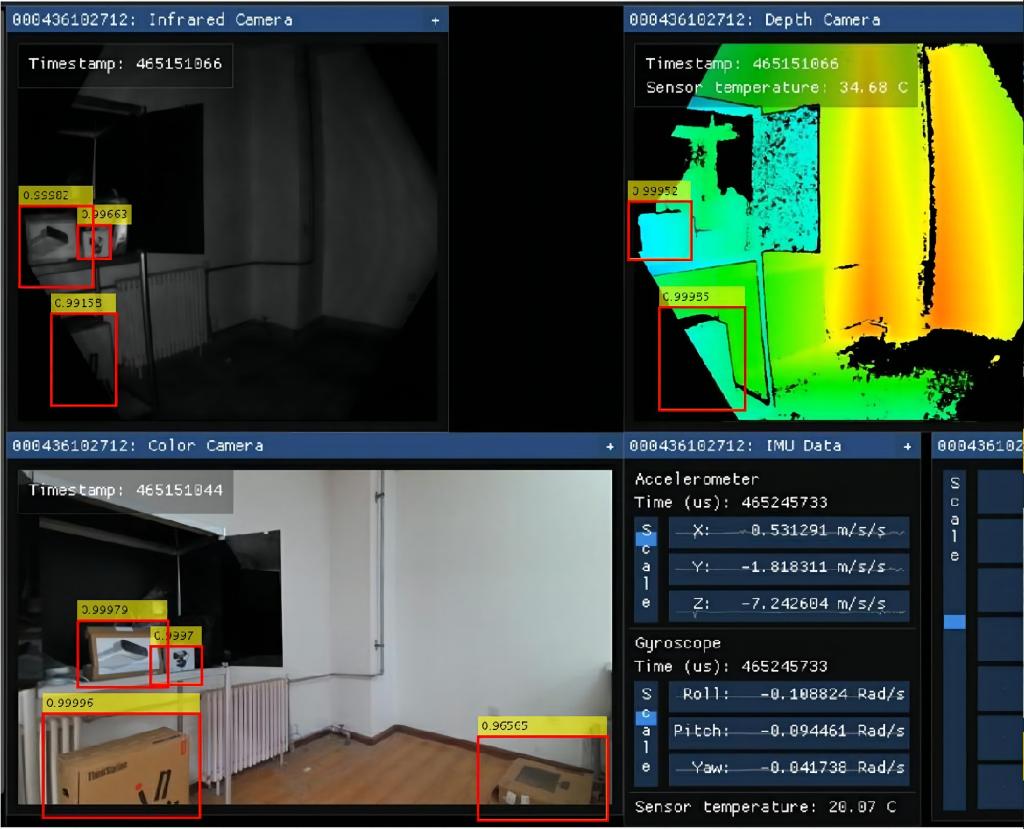
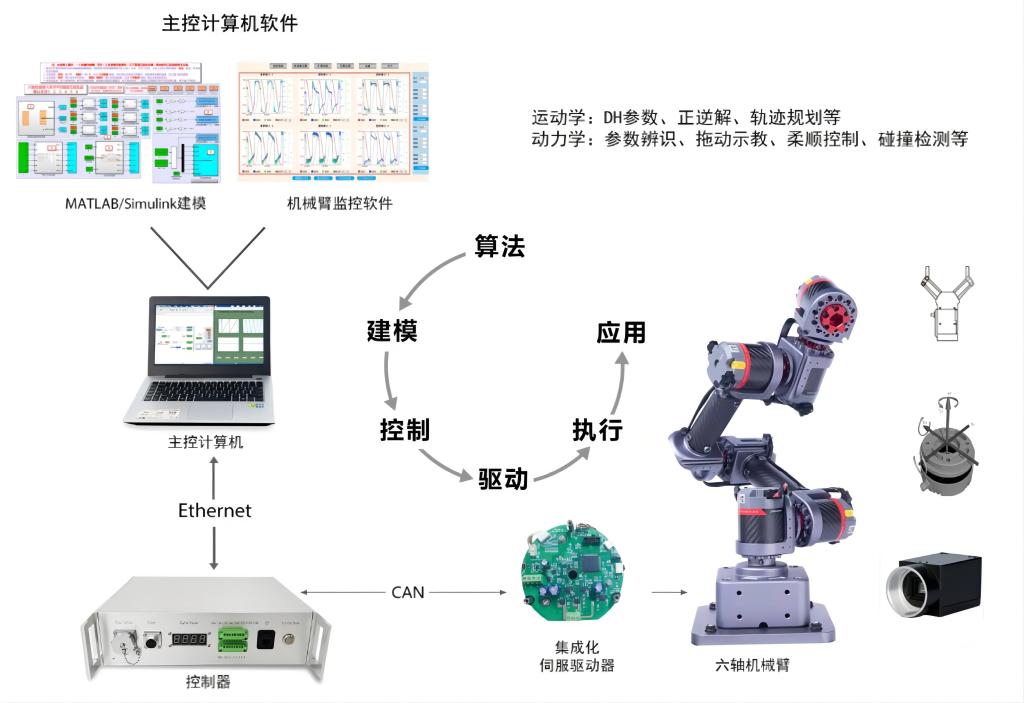
快递行业亟需解决大型物流中心生鲜类包裹分拣准确率和效率低下的问题,研究了仿生机械手抓取机理,信息融合对任务规划决策的影响因素。结合视觉操作关系推理、抓取部位检测和机器人运动规划与控制,基于视觉推理的多物体堆叠场景抓取方法,对于复杂场景高通量、多类型、杂乱无序的识别准确率为96.1%,试验样机能进行无损分拣,工作效率与人工1-2人相当,分拣错误率低于6%,控制技术和制造企业的接受程度较高、便于推广。